Resumamos al principio; El rastreador cargable hasta 15 unidades en un tamaño estándar (1.7m x 1m) con un controlador óptico es la solución óptima para el hogar. La potencia actual de los paneles da hasta 9kWp de potencia disponible en un conjunto. Así que obtenemos alrededor de 14MWh / año en cada rastreador.
excluyendo los costos de transporte Difiere mucho.
Cada rastreador solar REI ha sido diseñado para que todos puedan ensamblar y ejecutar el dispositivo. Además, puede crear una superficie de trabajo para 12, 15 o 18 paneles fotovoltaicos de hasta 1,7 m de altura. Esto significa que en las condiciones actuales puede obtener de forma segura hasta 9kWp de potencia en un rastreador, recibiendo incluso 14MWh por año. ¡Solo de un rastreador! Esto es mucho más que las expectativas del hogar y es perfecto para la agricultura. El conjunto (sin superficie de trabajo) puede llegar en un palé EUR. La superficie de trabajo en sí puede estar hecha completamente de acero metalurgia disponible en stock sin soldadura.

El rastreador solar REI "BooM" es más alto [5,5 m] y gracias a esto puede colocarse, por ejemplo, en un huerto, en una zona arbustiva y cerca de árboles no demasiado altos. Este tipo de rastreador es ideal para instalaciones individuales o en un grupo pequeño. La distancia entre los rastreadores debe ser de al menos 8 - 12 m dependiendo del terreno. Estos rastreadores no son adecuados para una granja. [Tenemos una línea de productos diferente dedicada a la granja].

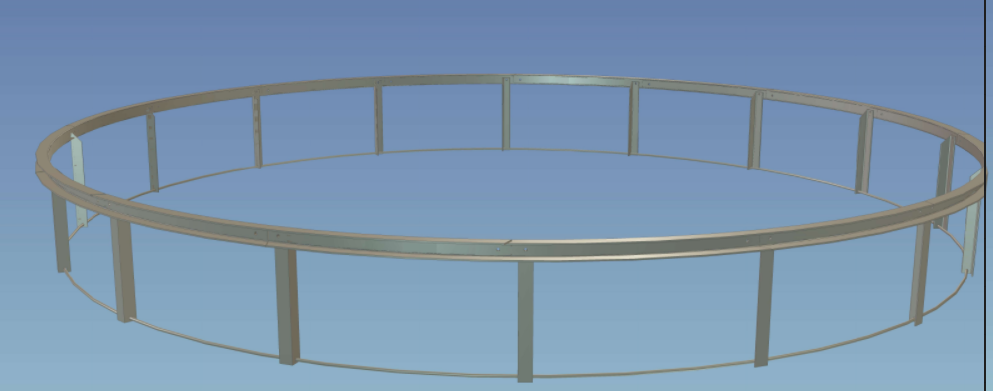
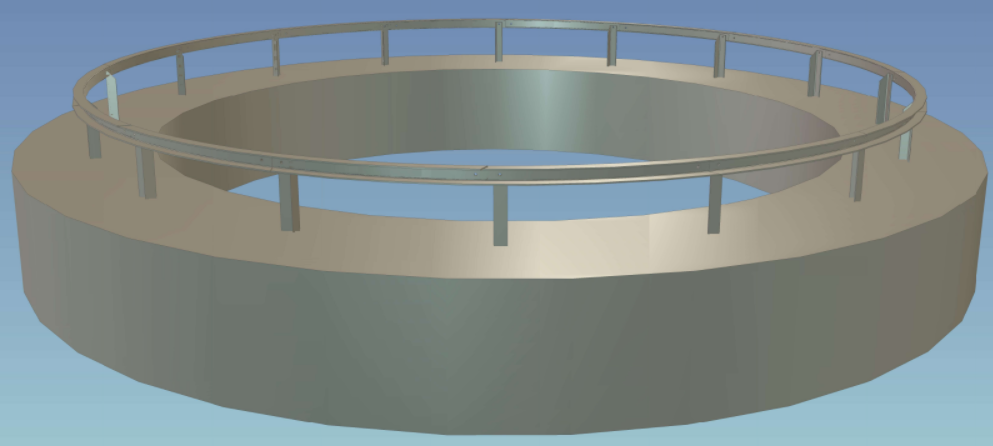
La base tiene la misma forma para ambos productos y requiere verter el anillo, que se puede colocar directamente en el suelo (sin excavación) o utilizando el suelo como encofrado. La altura del anillo es de unos 35-40 cm. Se puede utilizar hormigón "húmedo" y "seco" para verter dicha base. solo se necesita 1m3 de hormigón. No se requiere refuerzo especial, 2 cables de ø6 mm son suficientes para conectar las patas en el hormigón. (pasar por los agujeros en las piernas).
Algunos también colocan la estructura sobre postes, a veces tiene sentido cuando el suelo es extremadamente empinado. La estructura en sí está equilibrada con los paneles de modo que el perfil solo proporciona la estabilidad de la base y no se requiere peso adicional en la base. Zapata extendida.
No tiene que comprar todo el conjunto. Si tiene un taller con equipo básico, una amoladora angular o un taladro y algunas llaves son suficientes, puede obtener elementos del sistema de nosotros y los dibujos y la lista de materiales necesarios para fabricar los elementos restantes. De esta manera, ahorrará mucho en toda la instalación. La superficie de trabajo y los paneles en sí son muy fáciles de instalar. La superficie de trabajo consta de perfiles de hasta 6 m de largo, por lo que paga principalmente por el transporte, no por el producto en sí.
El rastreador solar Rei "EveN" es un rastreador que se baja al máximo. Ideal para instalaciones agrícolas donde la longitud de la sombra tiene un impacto directo en la densidad de potencia por hectárea. Mucho más resistente a las condiciones climáticas adversas. A menudo se instala en remolques como una solución móvil. También es posible colocar el rastreador en un techo plano, lo que funciona muy bien en el caso de un desarrollo denso.


excluyendo los costos de transporte Difiere mucho.
Kit Opti: básicamente todo lo que se puede preparar sin paneles fotovoltaicos. El bastidor de la estructura requiere un ajuste a las dimensiones de los paneles. Como sabe, los paneles tienen diferentes tamaños.

Independientemente de la versión, podemos preparar un conjunto. Empaque los elementos de construcción en una paleta y envíelos. Buscamos socios, contratistas, subcontratistas en todos los mercados.
Versión completa: requiere las dimensiones de los paneles para poder dejar bien la estructura. Esto tiene un impacto en el equilibrio para que todo funcione a la ligera. PRECAUCIÓN. Aquí, el precio también resulta de los costes de logística. Los elementos de la superficie de trabajo tienen hasta 6 m de largo.

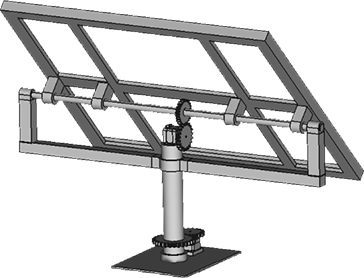
Smart Solar Tracker está diseñado para mantener el ángulo adecuado en una posición horizontal y vertical determinada en su dispositivo instrumento / receptor. En nuestro caso, el Smart Solar Tracker se utilizó para establecer correctamente los ángulos de inclinación y giro de los paneles fotovoltaicos correspondientes a su ubicación geográfica, en relación con la posición cambiante del sol, de tal manera que los rayos del sol caigan sobre los módulos montados en el panel en un ángulo óptimo, para conseguir el periodo de tiempo más largo posible de máxima producción de energía todos los días del año.
Esta solución mejora en gran medida la eficiencia de los módulos fotovoltaicos. Las mediciones realizadas a 51 ° N han demostrado que la eficiencia energética de los módulos solares montados en nuestro rack durante todo el año aumentó en un 40% en comparación con los módulos de la misma potencia fijados en la superficie del techo de manera estándar, con dirección de 0 ° S e inclinados en un ángulo de 35 °.
Dicho aumento de productividad permite una reducción significativa de los costes de inversión y ahorrar el espacio que es necesario para lograr la productividad planificada para toda la instalación. La condición para conseguir este objetivo pasa por la introducción de un diseño de mantenimiento y reparación económico y fácil.
Actualmente existen soluciones en el mercado que le permiten cambiar la posición de los paneles fotovoltaicos en uno o dos planos. Sin embargo, las construcciones disponibles están diseñadas para manejar un número demasiado pequeño de paneles en un sólo rack, para que la inversión en dicho sistema se justifique económicamente. La razón para limitar el tamaño de la superficie del panel se debe a la incapacidad de adaptación de la estructura tal como está, a condiciones climáticas desfavorables, por ejemplo, fuerza del viento. Las estructuras de soporte sugeridas, por ejemplo, una columna, absorben una parte significativa de la energía producida para el posicionamiento del panel, especialmente cuando tratamos la influencia de las masas de aire.
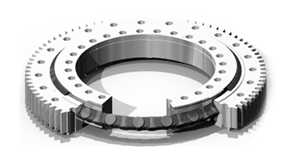
Algunos dispositivos en el mercado permiten la instalación de un gran número de módulos; sin embargo, son costosos de fabricar, debido al costoso método de montaje de rodamientos y al coste elevado de la estructura de la columna. Los grandes elementos no modulares obligan al uso de herramientas y transporte especializados durante la instalación y, por lo tanto, esto se traduce en gastos inadecuados relacionados con el diseño. Este enfoque da como resultado la construcción de granjas extensas con este tipo de instalaciones, con una tasa de retorno de la inversión relativamente baja.
Hasta ahora, los fabricantes han utilizado una columna colocada en el centro, que se ha utilizado para mantener el rodamiento centrado, lo que da como resultado la imposibilidad de usar un mecanismo de accionamiento que no se encuentre basado en un borde dentado. Una alternativa puede ser un motor lineal, sin embargo, de esta manera limitamos el rango de movimiento de la estructura. Las soluciones basadas en columnas provocan un aumento en los costes de producción de los racks.
COMO SUPERAR LAS DESVENTAJAS DE LAS COLUMNAS.
Debido a que el diámetro económicamente óptimo del conjunto debe ser de un mínimo de 1,5 m, la guía debe tener una estructura modular que permita realizar este supuesto sin restricciones logísticas que aparezcan con elementos uniformes. El diámetro relativamente grande de la guía en relación con la altura del soporte permitió obtener tres propiedades muy importantes e inaccesibles en otros diseños:
La mayor rigidez del diseño y su estructura esquelética, también permitieron eliminar un punto débil de la construcción que surgió de las imperfecciones de las unidades disponibles en el mercado diseñadas para inclinar el plano de trabajo. Los ingenieros suelen utilizar motores lineales basados en un tornillo trapezoidal. Montado, como se muestra en el dibujo que sirve de ejemplo.
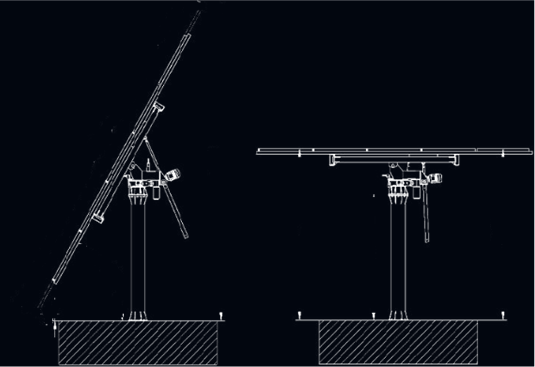
Debido que el montaje del motor lineal en una estructura de poste debe realizarse de manera que permita su movimiento junto con el bastidor superior giratorio, el tamaño del motor y sus parámetros deben reducirse significativamente. La debilidad de esta solución se manifiesta con una baja resistencia a las sacudidas de un plano de trabajo ondulado. Las ondas se producen por la combinación de la fuerza dinámica del viento dinámico y el peso específico de la estructura. El tamaño del plano de trabajo aumenta el par de torsión que debe mover el motor lineal.
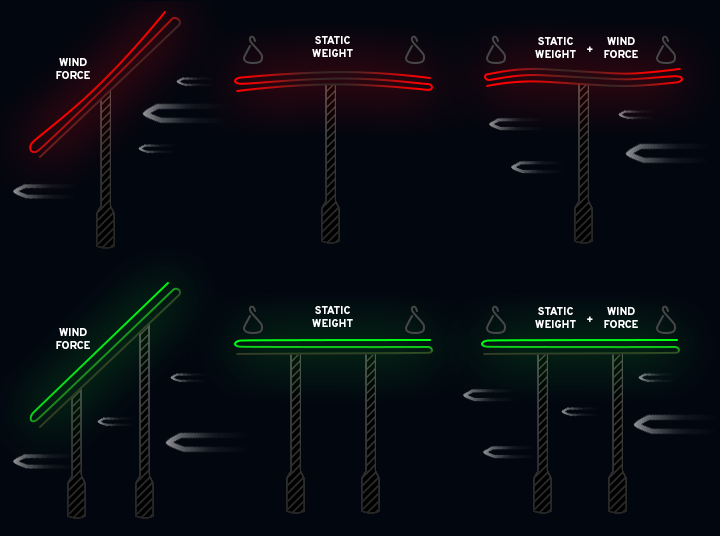
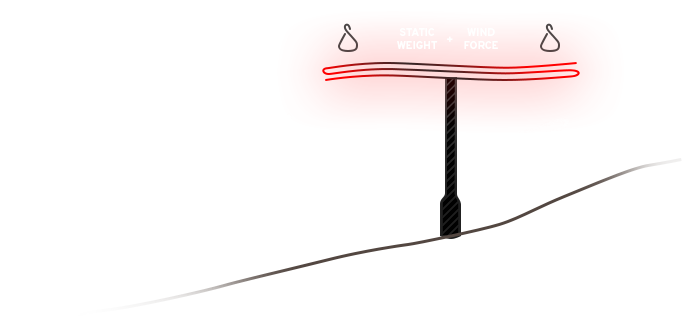
El uso de un impulsor de bobina dedicado permite obtener una buena rigidez de la estructura y, además, cuando se ajusta el plano de trabajo a la posición de seguridad horizontal (similar a la posición paralela al suelo), aumenta significativamente la resistencia del conjunto a la influencia de vientos fuertes y racheados. La mayoría de los controladores disponibles en el mercado, después de conectar el anemómetro, permiten colocar el soporte en una posición segura predeterminada en caso de detección del umbral de velocidad del viento. La posición predeterminada en condiciones de trabajo reales, no siempre es la óptima, debido a las diferentes formas del terreno.
Nuestra unidad de deslizamiento dedicada también desempeña un papel de refuerzo para el marco principal, porque su guía está integrada con los elementos de la estructura del marco.
Existe una división artificial universal de controladores entre aquellos que operan en un sistema cerrado y los que operan en abierto. Esta división proviene principalmente del apego a las tecnologías precursoras de soluciones específicas, que causan el estancamiento en el desarrollo de los controladores. En el mercado actual, existen muy pocos productos que den un resultado satisfactorio en las pruebas. Todas las soluciones restantes se centran principalmente en cuestiones teóricas y no en la creación de las soluciones que demanda el mercado.
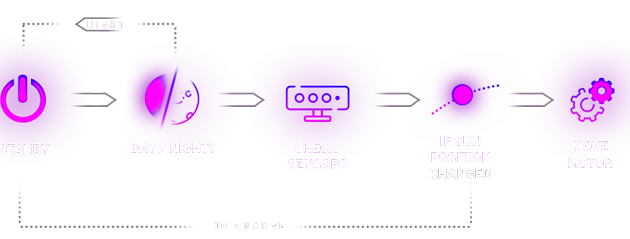
Al utilizar la la nomenclatura desarrollada, los sistemas cerrados funcionarán bien en la zona tropical con nubosidad insignificante - sólo en lugares donde las estaciones de lluvias o cualquier otro cambio climático en el medio ambiente entre las estaciones sea mínimo. Los sistemas en circuito abierto, en forma de algoritmo puro, podrán resolver problemas de irradiación inestable, pero sin embargo, su utilidad es más bien de laboratorio.
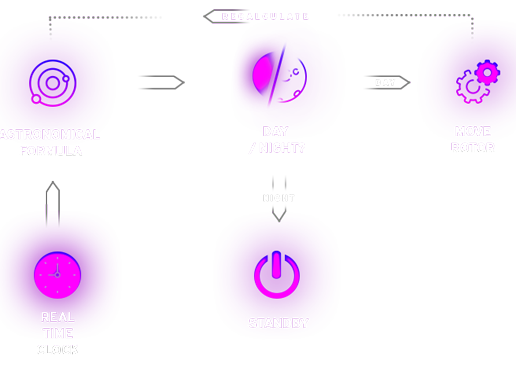
La visión de REI asume una concepción de un controlador que supera el nivel actual de tecnología. Un controlador que realiza con éxito un concepto de sistema híbrido y al mismo tiempo es totalmente configurable y manejable. Un controlador que deja la elección al usuario. Anulamos las limitaciones que impone una división convencional, que resulta de una lógica operacional programada de forma rígida.
Nos propusimos abrir posibilidades ilimitadas gracias al uso de plataformas IoT eficientes, que permiten cambiar la implementación de los algoritmos primarios y secundarios de manera relativamente fácil, controlando así el comportamiento de todo el conjunto.
Al complementar los cálculos del algoritmo con los datos recogidos por sensores y un número ilimitado de periféricos, es posible ejecutar la autocalibración del conjunto, incluso en las condiciones de campo más duras.
Allanamos el camino para facilitar la recopilación de datos para futuras investigaciones. Permitimos una corrección mutua del funcionamiento de los soportes que cooperan en una configuración maestro-esclavo. Por lo tanto, creamos la posibilidad de utilizar el aprendizaje automático o la inteligencia artificial para aplicaciones más sofisticadas.